s120怎么可以修改参数
今天我们来讲解一下西门子PLC使用通讯控制S120变频器
通过DP总线实现S7-300与SINAMICS S120通讯
1.1 DP总线通讯功能
S7-300与SINAMICS S120之间DP通讯借助于系统功能块SFC14/SFC15进行周期性数据通讯。周期性数据交换指的是数据的实时交换,如控制字和设定值。

1.2 DP地址设定
驱动侧,S120上通过拨码开关来设置DP地址,设定范围为1-126.
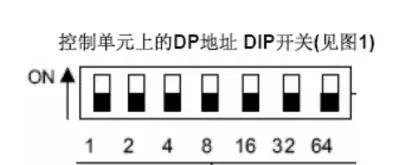
当所有拨码拨至ON或者OFF状态时,通过P918参数设置DP地址。
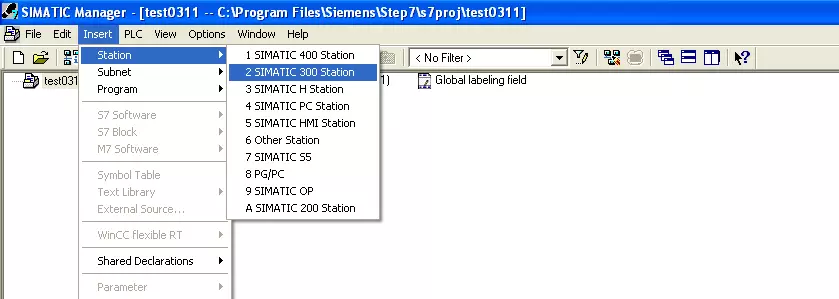
1.3 STEP7硬件配置
在STEP7中新建项目,点击Insert-Station-2. Simatic 300 Station
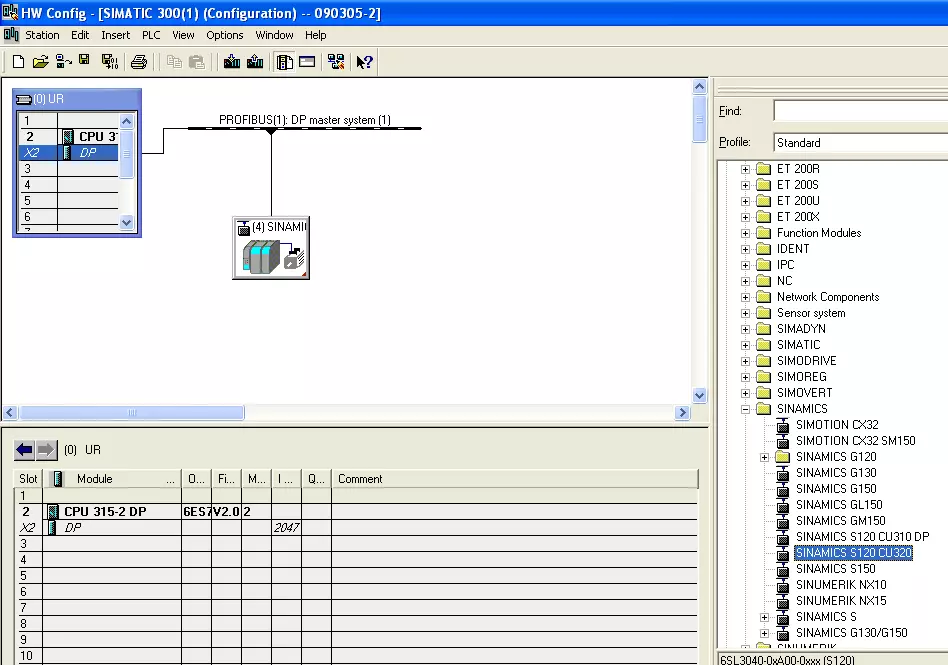
打开硬件组态,新建DP NETWORK,在CATALOG中选择相应S120产品,如SINAMICS S120 CU320,将其加入DP总线,DP地址设置应与驱动侧设置地址一致。
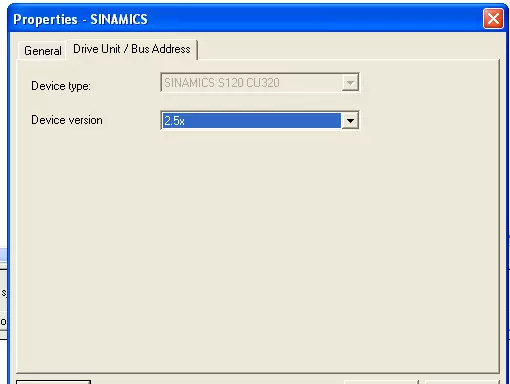
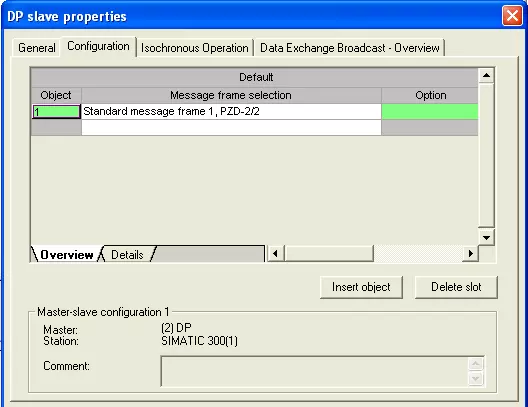
选择相应的S120Firmware版本,如V2.5
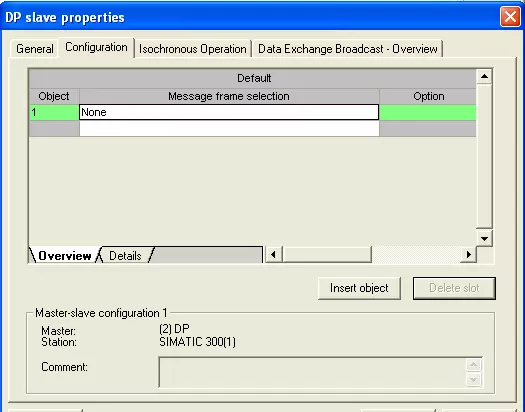
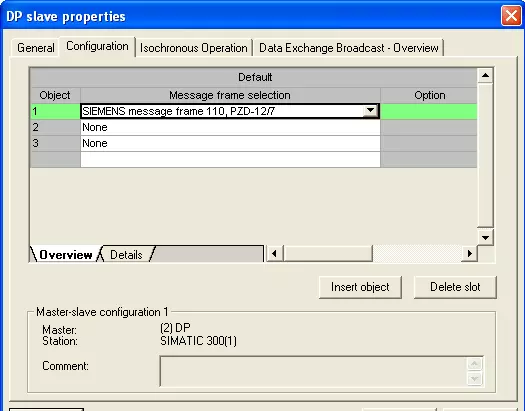
此时会要求选择Message frame,点击选中Object1,然后点击Delete slot。
这时Message frame selection为None。点击OK。
保存编译硬件组态,将其下载至PLC中。
注:此时仅将PLC硬件配置完成,S7-300与S120之间通讯尚未建立,CPU会BF灯亮,SF等闪烁,S120侧LED DP灯不亮。
1.4 S120配置
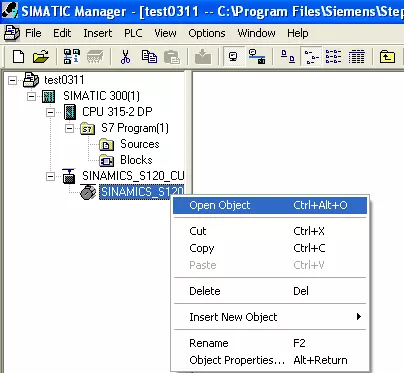
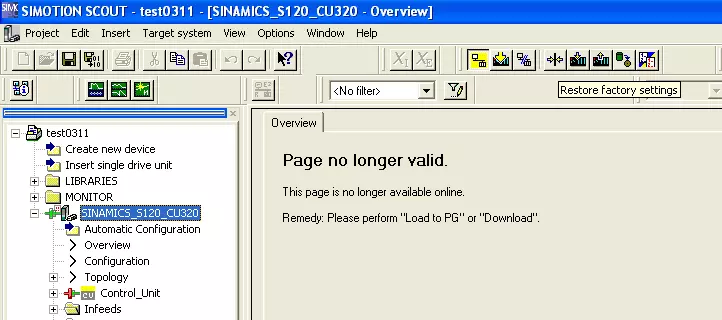
打开STEP7,此时会出现SINAMICS S120 CU320,点击Open Object打开S120项目。
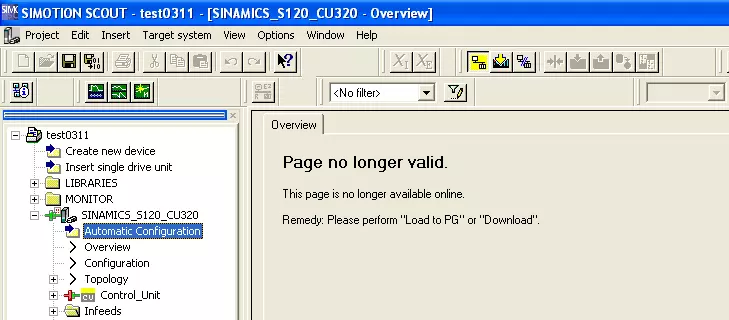
打开S120项目后,选择在线Connect to target system

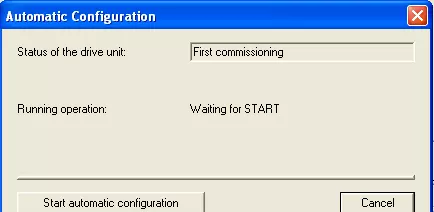
若是新的CF卡可选择自动配置Automatic Configuration,通过DRIVE-CLIQ口将S120硬件配置装载至PG电脑。
若是旧CF已有配置,可选择工厂复位,将参数复位到出厂状态。
点击Start automatic configuration按钮,开始自动配置
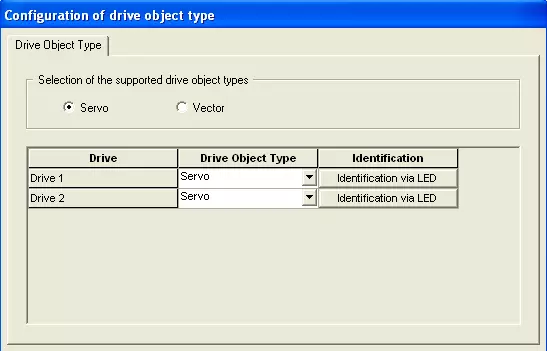
提示选择S120驱动类型,选择SERVO伺服方式。
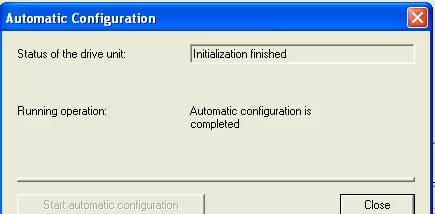
配置完毕出现下图画面,点击close
此时需要离线配置,点击Disconnect from target system
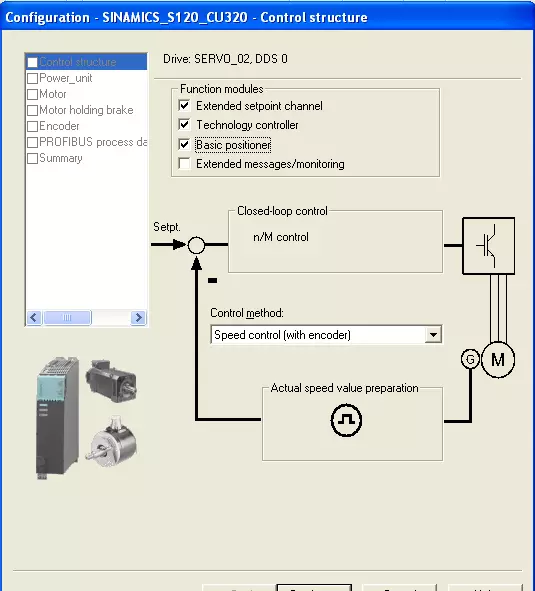
配置驱动SERVO_02,点击Confiure DDS

出现S120驱动配置画面,将前三项都打勾,激活基本定位功能。
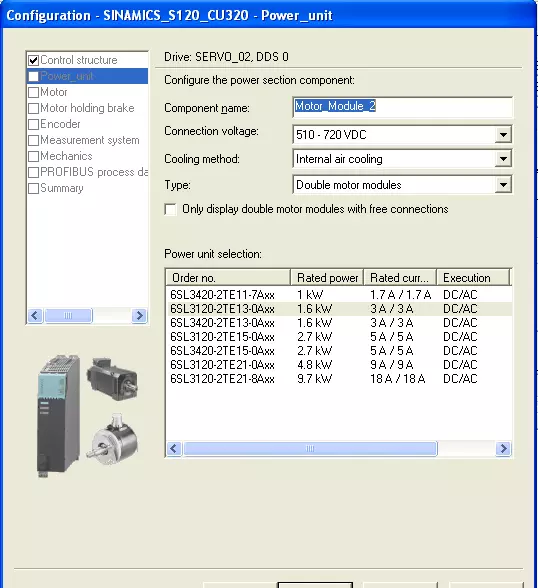
配置MotorModule,由于之前已有Drive-CLIQ将配置读上来,直接Continue
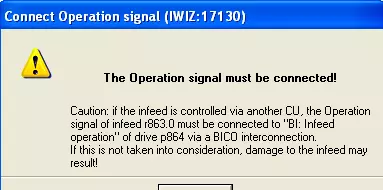
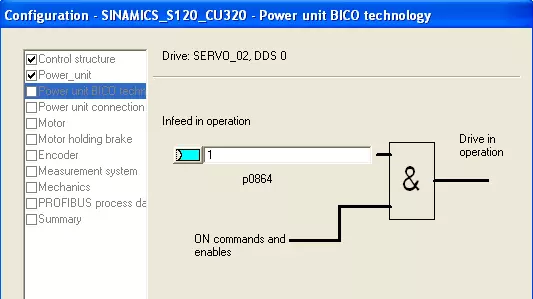
出现提示,将P0864 Infeed in operation设为1
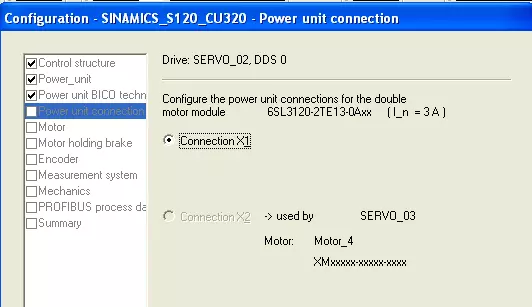
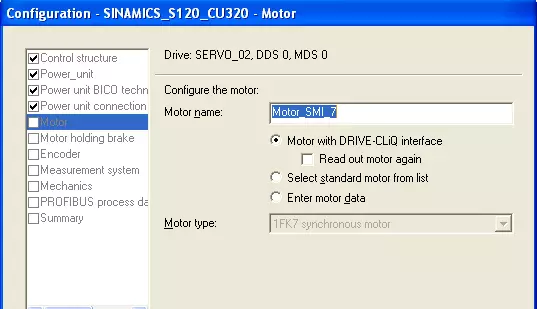
配置电机,直接由Connection X1通过DriveCLIQ读出电机信息
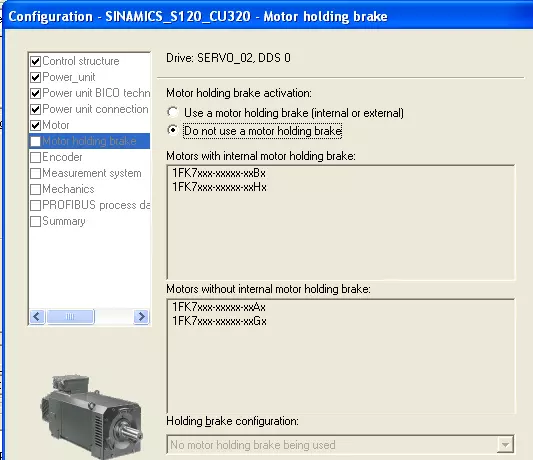
选择电机是否有抱闸刹车
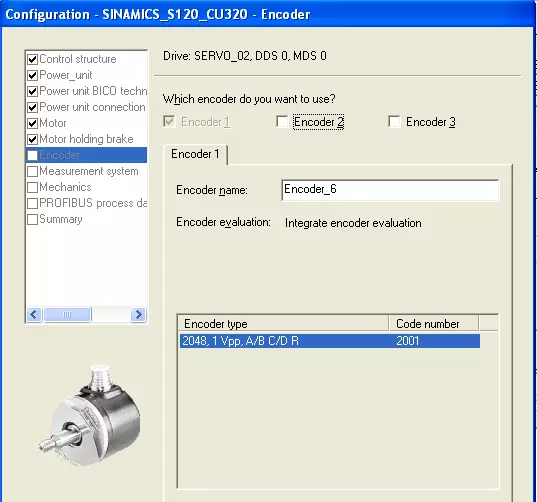
选择编码器类型
已有DriveCLIQ读出
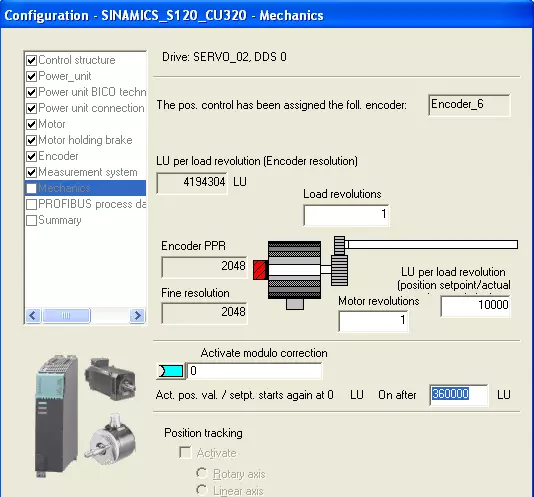
在Mechanics画面中
设置传动比,Load revolutions 和Motor revolutions
设置S120电机一圈所对应的长度单位LU。
LU per load revolutions画面中将值设为了10000,即电机一圈代表走了10000个LU
注:LU per load revolutions设置的值与编码器精度有关,不能大于LU per load revolutions的值
Active modulo correction
激活模态,对于电机设定的长度和实际长度从360000LU开始回到0,循环执行。即0-360000再回到0.
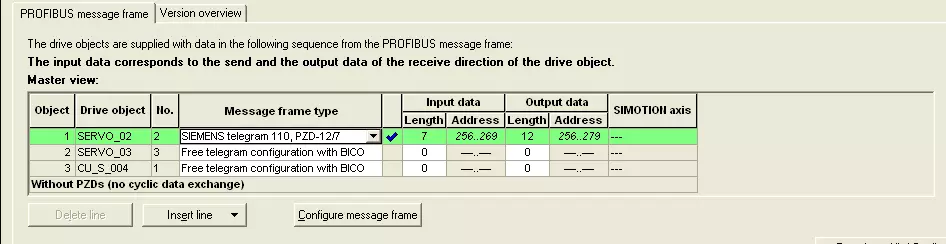
选择通讯报文,对于基本定位的报文选择SIEMENS telegram110,PZD-12/7
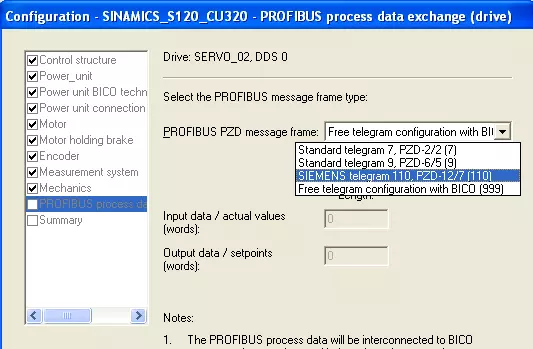
完成配置。
点击SINAMICS_S120_CU320下Configuration
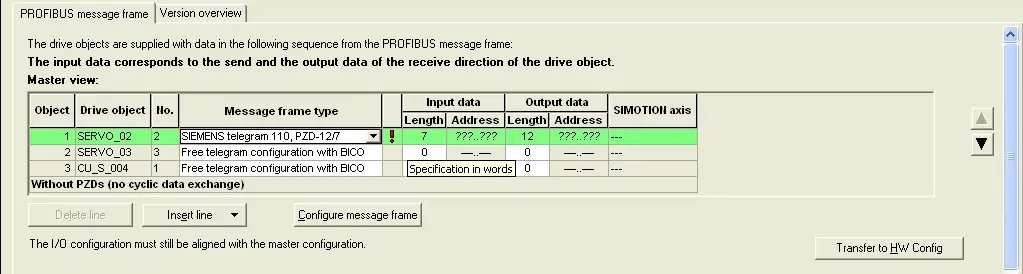
可以看到会有红色惊叹号,且地址为问号,点击Transfer to HW Config
将配置传送到硬件组态中。点击ACTIVE按钮并将其激活。保存编译。
再返回到SINAMICS_S120_CU320下Configuration画面,可以看到
红色惊叹号变为蓝色的勾,地址也已经分配为256开始的地址。
保存编译整个项目。连线。下载整个项目。
1.5 S7-300中通讯编程
利用SFC14和SFC15读写S120,达到通讯控制S120的目的。
SFC14读,占用7个PZD
在LADDR填写S120硬件地址,256对应16进制即W100
RECORD中填写设定DB地址 P#DB2.DBX0.0 BYTE 14,即从DB2.DBX0.0开始的14个BYTE的地址分配为从S120里读出的PZD值
RET_VAL 返回值 显示故障信息
SFC15写,占用12个PZD
在LADDR填写S120硬件地址,256对应16进制即W100
RECORD中填写设定DB地址 P#DB1.DBX0.0 BYTE 20,即从DB1.DBX0.0开始的20个BYTE的地址分配为向S120里写的PZD值
RET_VAL 返回值 显示故障信息

定义相对应的DB块 DB1 DB2
1.6 基本定位
1.6.1 JOG点动
S120中基本定位功能的点动有两种方式
速度方式:点动按钮按下,轴以设定的速度运行直至按钮释放
位置方式:点动按钮按下并保持,轴以设定的速度运行至目标位置后自动停止
在通过通讯控制S120之前需注意,需将PLC与S120的通讯控制位置1
即将P854 Master ctrl by PLC 参数对应r2090 bit 10,即DB1.DBX0.2

执行点动功能,需先使能S120 ON/OFF1(P840)
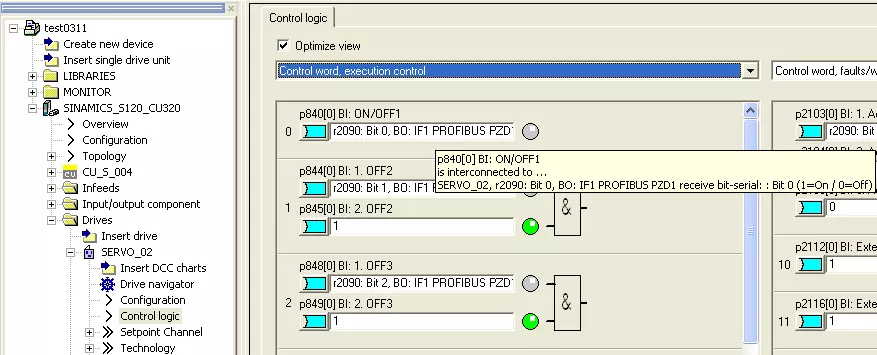
打开Drives下Servo_02下Control logic可以看到相关控制字及状态字
可以看到,由于之前选择了报文结构110,已经自动将控制字配置好。
P840 ON/OFF1相对应的是r2090 bit0,即PZD1的bit0
我们已经定义好通过通讯写S120PZD的地址,PZD1 Bit0对应的DB地址即DB1.DBX1.0。
还有P844 bit1 OFF2信号 即r2090 bit1 对应DB1.DBX1.1
P845 bit1 OFF3信号 即r2090 bit2 对应DB1.DBX1.2
P852 Enable operation 即r2090 bit3 对应DB1.DBX1.3
将这些信号都置1.S120使能。
点击Servo_02-Technology-Basic Psitioner-JOG,进入JOG画面
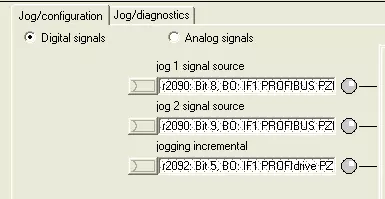
设置点动命令源
Jog1 signals source 即r2090 bit 8 DB1.DBX0.0
Jog2 signals source 即r2090 bit 9 DB1.DBX0.1
点动方式选择 0速度 1位置
Jogging incremental 即r2092 bit5 DB1.DBX5.4
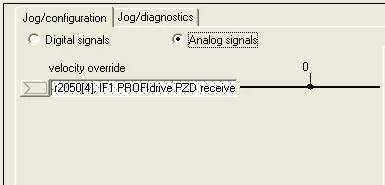
在Analog Signal画面中
Velocity override 即r2050 PZD5 DB1.DBW8
此为点动速度的倍率,通过修改其值来改变点动的速度,16进制4000H,10进制16384对应100%
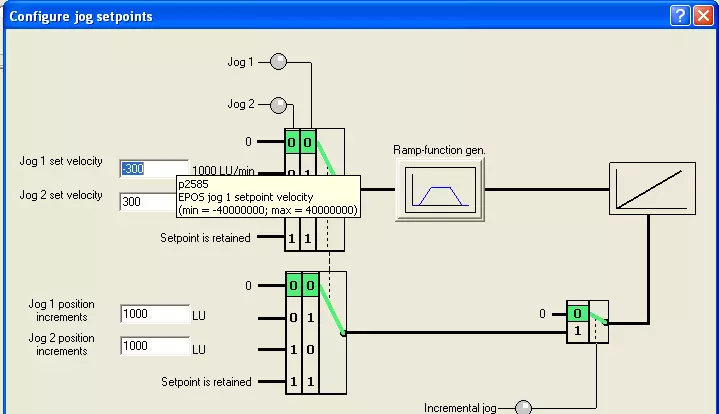
在Configure jog setpoints画面中设置JOG1和JOG2的速度和位置
1.6.2 回零/寻参
点击Servo_02-Technology-Basic Psitioner-Homing,进入Homing画面
Homing又分active homing主动回零和passive homing被动回零.
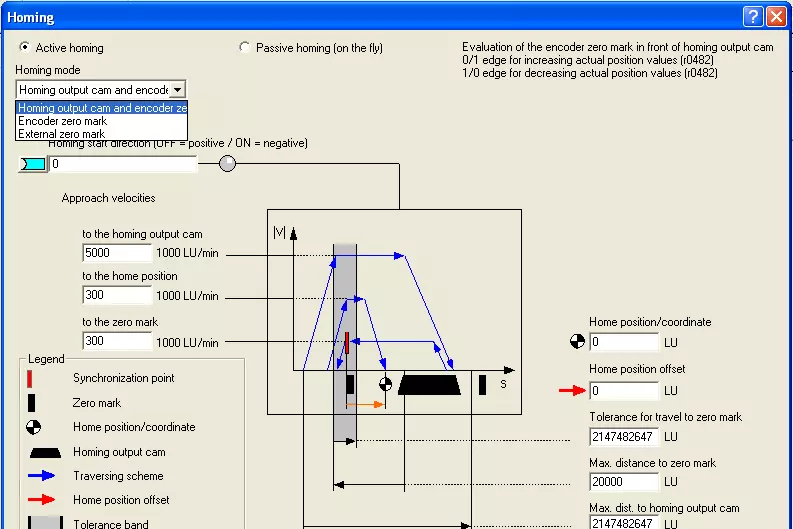
Active homing
如下图可以看到,主动回零分为三种形式
Homing output cam and encoder zero mark使用接近开关加编码器零位
Encoder zero mark 仅编码器零位
External zero mark 仅外部零标志
最常用的就是接近开关加编码器零位的方式
在homing/configuration
Referencing start r2090 bit11即DB1.DBX0.3 为寻零开始信号
Search for reference,reference cam r2092 bit2 即DB1.DBX5.2即外部接近开关

动作过程
1, 将S120使能,P840 DB1.DBX1.0置1
2, 寻零开始信号置reference startDB1.DBX0.3置1 ,电机开始运行
3, 将外部接近开关信号对应reference cam ,当DB1.DBX5.2为1时,电机减速,搜寻编码器零脉冲,遇到后停止。
寻零结束
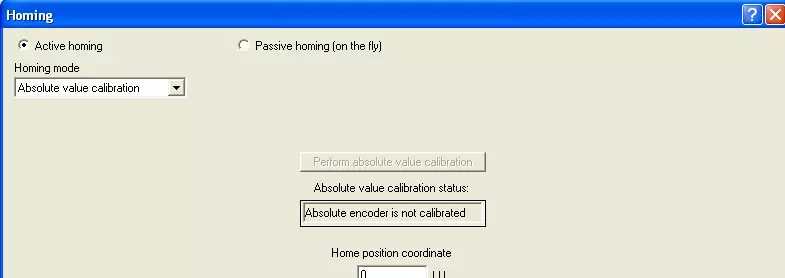
当编码器为绝对值编码器时,会看到以下画面
在Home position coordinate中设置坐标值,点击Perform absolute value calibration做编码器校准即可
1.7 基本定位_程序步
通过使用Traversing Blocks"程序步"模式可自动执行一个完整的定位程序,也可实现单步控制;但只有当前程序步执行完后下一个程序步才有效。
在S120中提供了最多64个程序步供使用。
1.7.1 程序步设置
点击Servo_02-Technology-Basic Positioner-Traversing Blocks,进入画面
进入程序块设置画面,对于程序步有特定的数据结构,如下图
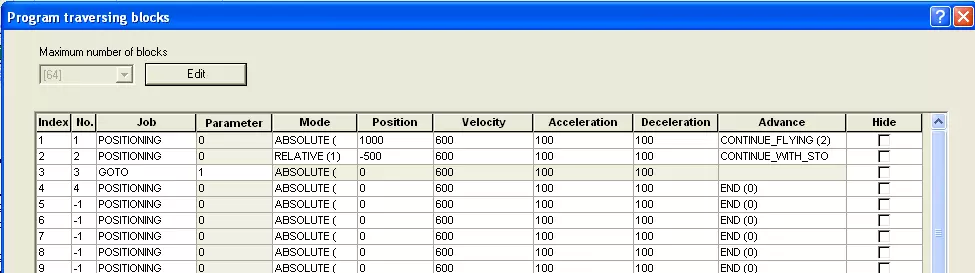
P2616 每个程序步都要有一个任务号,运行时依此任务号顺序执行
P2621 表示该程序步的任务。可选择:Positioning、Endless_Pos/Endless_Neg、WaitingGotoSet_0/Reset_0
P2622(Parameter)依赖于不同的Job,对应不同的Job有不同的意思
P2023.8/9(Mode)定义定位方式,仅当任务(Job)为位置方式(Position)时有效
P2617/P2618/P2619/P2620(Position,Velocity,Acceleration,Deceleration)指定运动的位置,速度,加减速
P2623.4/5/6 (Advance)制定本任务结束方式。
END:本任务结束不连续执行下一任务,Continue_With_Stop:本任务结束准确定位,电机停止后重新启动开始下一任务。Continue_Flying:本任务结束连续执行下一任务。
1.7.2 程序步示例 如上图
第1步,以速度600,加减速100%,走绝对定位位置1000,本任务结束连续执行下一任务
第2步,以速度600,加减速100%,走相对定位-500,本任务结束准确定位后开始下一任务
第3步,Goto 1,回到第1步,循环执行。
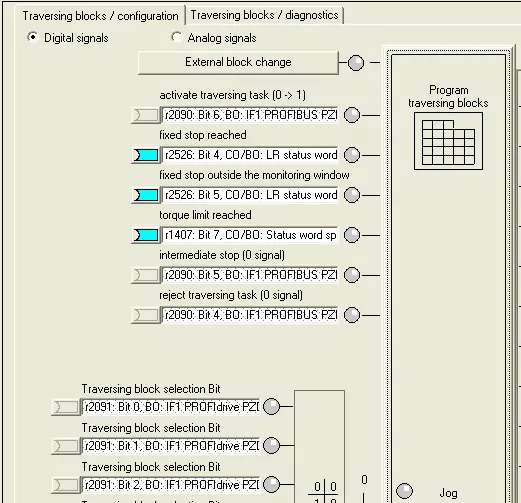
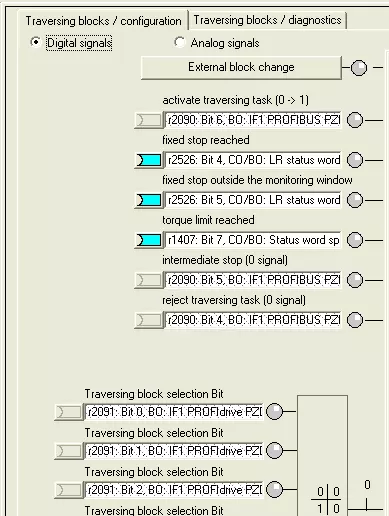
1.7.3 程序步执行
1.选择不拒绝任务reject traversing task和没有停止命令
P2641=r2090 bit4 即DB1.DBX1.4
P2640=r2090 bit5 即DB1.DBX1.5 都置1
2.选择 程序步选择位Traversing block selection bit
P2625=r2091 bit0 即DB1.DBX3.0 置1
3.使能S120
P840=r2090 bit0 即DB1.DBX1.0 置1
4.激活程序步Active traversing task(上升沿信号)
P2631=r2090 bit6 即DB1.DBX1.6 置1
之后即按照之前程序步中设置的运行。
1.8 Direct setponit specification/MDI(直接设定点输入方式/手动数据设定方式)
1.8.1 MDI有两种不同模式
位置(position)模式P2653=0
手动定位或称速度模式P2653=1这两种模式可在线切换
速度模式是指轴按照设定的速度及加减速运行,不考虑轴的实际位置。
位置模式是指轴按照设定的位置、速度、加减速运行;
位置模式又可分为绝对位置(P2648=1)和相对位置(P2648=0)两种方式
1.8.2 MDI 执行步骤
1.使能S120
P840=r2090 bit0 即DB1.DBX1.0 置1
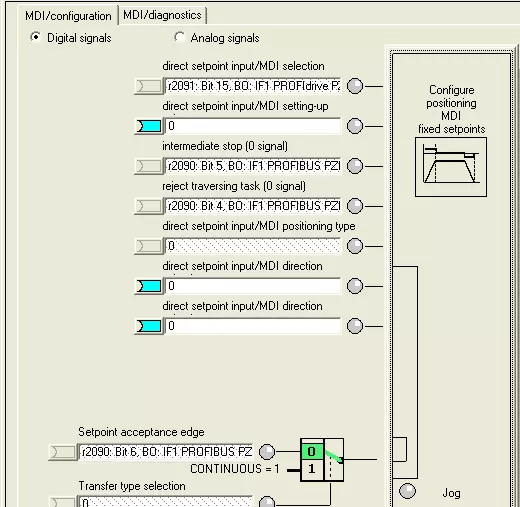
2. direct setpoint input/MDI selection 选择MDI模式
P2647=r2091 bit 15 即DB1.DBX2.7 置1
3.选择不拒绝任务reject traversing task和没有停止命令
P2641=r2090 bit4 即DB1.DBX1.4
P2640=r2090 bit5 即DB1.DBX1.5 都置1
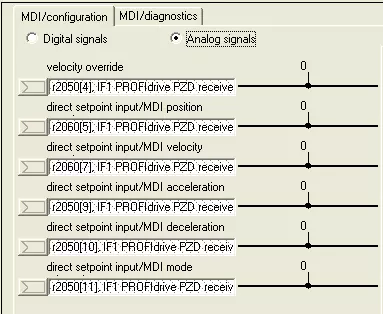
4.设置MDI位置速度加减速参数
4.1 Velocity override 速度倍率
P2646=r2050[4],即DB1.DBW8 W4000对应100%
4.2 Direct setpoint input/MDI position MDI位置
P2642=r2060[5],即DB1.DBD10
4.3 Direct setpoint input/MDI velocity MDI速度
P2643=r2060[7],即DB1.DBD14
4.4 Direct setpoint input/MDI acceleration MDI加速度
P2644=r2050[9],即DB1.DBW18 W4000对应100%
4.5 Direct setpoint input/MDI acceleration MDI加速度
P2644=r2050[9],即DB1.DBW18 W4000对应100%
4.6 Direct setpoint input/MDI deceleration MDI减速度
P2645=r2050[10],即DB1.DBW20 W4000对应100%
4.7 Direct setpoint input/MDI mode MDI位置模式(相对/绝对)
P2654=r2050[11],即DB1.DBW22
Signal via CI: p2654 = xx0x hex - absolute 绝对位置 Signal via CI: p2654 = xx1x hex - relative 相对位置 Signal via CI: p2654 = xx2x hex - abs_pos
绝对位置,正向 Signal via CI: p2654 = xx3x hex - abs_neg
绝对位置,反向(仅对模态)
5. Setpoint acceptance edge MDI设置接收上升沿信号
P2650=r2090 bit6,即DB1.DBX1.6
置1后即按照之前设定的速度位置开始MDI运行。
相关文章
-

华为mate10参数及价格
Mate 10系列后置相机延续了双摄设计,参数为SUMMLIUX-H 1:1.6/27 ASPH,这次的徕卡双摄升级至F1.6光圈,双OIS光学防抖,等效27mm焦距,超越三星Note 8的F1.7光圈,无疑将带来更好的暗光拍摄以及背景虚化的效果。华为Mate 10标准版将配备5.88英寸16:9屏幕,2K分辨率,尺寸为150.2 x 77.5 x 8.4mm,略低于华为Mate 9,前置指纹识别设计。
2025-06-21 阅读 (107) -

标致508报价及图片参数大全
2023款标致508L有三款不同配置的车型。虽然说它们在外观和内饰的布局上是如出一辙,不过在配置上还是有所不同的。比如入门版车型驭控旗舰版,指导价格为16.37万元。在安全配置方面,配备了ABS防抱死、制动力分配、制动辅助、牵引力控制、车身稳定系统、第一排安全带未系提醒、胎压报警、主/副驾驶安全气囊、第一排侧气囊、侧安全气帘。
2024-04-23 阅读 (108) -
登峰软件程式连接参数怎么设置
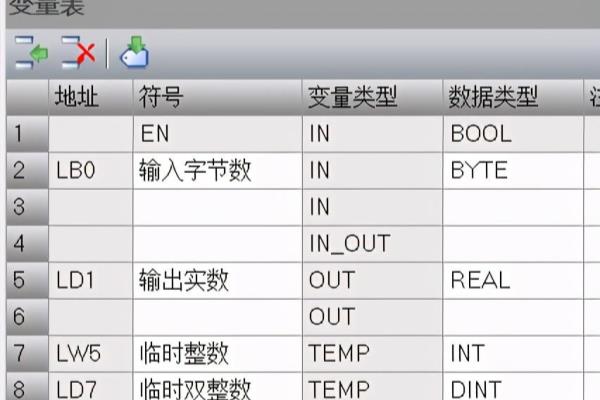
带参数子程序——不仅是从功能上进行划分,最主要的作用是对具有相同或相似功能的工艺过程,可多次重复调用(使用时),为减少重复编程而进行的程序设计。3、打开子程序接口【变量表】如找不到【变量表】,按以下图方式--可以点【视图】---【组件】--【变量表】,即可打开。从子程序中可看出,局部变量地址以【L0.0,它就是所说的---形式参数—称为形参.而全局变量地址I0.0----叫实际参数—称为实参...
2024-10-11 阅读 (114) -

西铁城光动能手表图片以及参数型号
`腕表之家 品牌新闻` 西铁城推出九款全新腕表,展现super titanium超级钛和eco-drive光动能这两项标志性技术。super titanium超级钛是西铁城的专利材质,比普通不锈钢轻40%,硬度却是后者的五倍。借助eco-drive光动能技术,电池可以将所有光源都转化为能量为腕表提供动力,同时会把多余能量储存起来。
2023-10-12 阅读 (127) -
雅迪t5冠能动力版参数及价格
续航里程是可以达的100公里的。雅迪dt5冠能版搭载的是TTFAR 电机、附带8级增程系统、TTFAR能量回收控制器,减少耗电,提升续航。动力采用低衰能耗的TTFAR石墨烯三DA代电池... 续航里程是可以达的100公里的。雅迪dt5冠能版搭载的是TTFAR 电机、附带8级增程系统、TTFAR能量回收控制器,减少耗电,提升续航。
2024-07-14 阅读 (413) -
s120怎么可以修改参数
即将P854 Master ctrl by PLC 参数对应r2090 bit 10,即DB1.DBX0.2 再返回到SINAMICS_S120_CU320下Configuration画面,可以看到 打开Drives下Servo_02下Control logic可以看到相关控制字及状态字 P2621 表示该程序步的任务。可选择:Positioning、Endless_Pos/Endless_Neg、WaitingGotoSet_0/Reset_0...
2024-09-02 阅读 (200) -
惠威d1010mkii参数
惠威D1010MK2是4英寸的中低音和一英寸的软球顶高音,作为世界著名Hi-End高级音响制造商;国际电声界的传奇atradition of perfect soundHiVi惠威源自中国,名誉世界。经过24年的高速发展,HiVi惠威已成为世界高级音响制造公司,并且以各类顶级电声产品享誉业界。作为世界著名Hi-End高级音响制造商,HiVi惠威在国际上已经获得如此赞誉:HiVi惠威将国际最顶级的电声科技结合中国精密制造技术,所以HiVi惠威产品拥有业界最佳品质和最高性价比。
2024-06-22 阅读 (141) -
数控车床z轴方向反了怎么调参数
数控车床z轴方向变反,在系统参数这么操作,查看伺服驱动器的相关参数,改一下就可以了。如果是速度控制方式或扭矩控制方式,直接在驱动中改电机的旋转方向;如果是位置控制方式(脉冲+方向),在驱动中改控制装置所发脉冲的正负逻辑即可。
2024-06-05 阅读 (110) -

一汽丰田mpv格瑞维亚参数
格瑞维亚的外观基本上沿用了美版SIENNA的造型,整体不仅体现了丰田家族化的造型元素,同时也在原有基础上进行了更加运动化的改变,尤其是底部巨大的梯形进气格栅,内部采用了扁平的六边形网格,霸气十足。侧面来看,格瑞维亚展现出了无比典型的美式风格,线条够饱满,肌肉感很强。尺寸方面,格瑞维亚的长宽高分别为5175/1995/1785mm,轴距为3060mm,和同价位的MPV车型不相上下。
2024-05-17 阅读 (105)
热门资讯
-
续航里程是可以达的100公里的。雅迪dt5冠能版搭载的是TTFAR 电机、附带8级增程系统、TTFAR能量回收控制器,减少耗电,提升续航。动力采用低衰能耗的TTFAR石墨烯三DA代电池... 续航里程是可以达的100公里的。雅迪dt5冠能版搭载的是TTFAR 电机、附带8级增程系统、TTFAR能量回收控制器,减少耗电,提升续航。
2024-07-14 阅读 (413) -
2024-09-02 阅读 (200)
-
惠威D1010MK2是4英寸的中低音和一英寸的软球顶高音,作为世界著名Hi-End高级音响制造商;国际电声界的传奇atradition of perfect soundHiVi惠威源自中国,名誉世界。经过24年的高速发展,HiVi惠威已成为世界高级音响制造公司,并且以各类顶级电声产品享誉业界。作为世界著名Hi-End高级音响制造商,HiVi惠威在国际上已经获得如此赞誉:HiVi惠威将国际最顶级的电声科技结合中国精密制造技术,所以HiVi惠威产品拥有业界最佳品质和最高性价比。
2024-06-22 阅读 (141) -
2023-10-12 阅读 (127)
-
2024-10-11 阅读 (114)
最新资讯
-
2025-06-21 阅读 (107)
-
2024-10-11 阅读 (114)
-
2024-09-02 阅读 (200)
-
续航里程是可以达的100公里的。雅迪dt5冠能版搭载的是TTFAR 电机、附带8级增程系统、TTFAR能量回收控制器,减少耗电,提升续航。动力采用低衰能耗的TTFAR石墨烯三DA代电池... 续航里程是可以达的100公里的。雅迪dt5冠能版搭载的是TTFAR 电机、附带8级增程系统、TTFAR能量回收控制器,减少耗电,提升续航。
2024-07-14 阅读 (413) -
惠威D1010MK2是4英寸的中低音和一英寸的软球顶高音,作为世界著名Hi-End高级音响制造商;国际电声界的传奇atradition of perfect soundHiVi惠威源自中国,名誉世界。经过24年的高速发展,HiVi惠威已成为世界高级音响制造公司,并且以各类顶级电声产品享誉业界。作为世界著名Hi-End高级音响制造商,HiVi惠威在国际上已经获得如此赞誉:HiVi惠威将国际最顶级的电声科技结合中国精密制造技术,所以HiVi惠威产品拥有业界最佳品质和最高性价比。
2024-06-22 阅读 (141)